
BOSM-6010 Расточно-фрезерный станок с оппозитной головкой
1. Использование машины:
BOSM-6000*1000 Портальный двухстоечный расточно-фрезерный станок с ЧПУ с фиксированной балкой представляет собой специальный станок для обработки стрелы/рукояти экскаватора.Подушка, может реализовать быструю обработку заготовки, заготовку можно сверлить, фрезеровать и растачивать в пределах эффективного диапазона хода, заготовку можно обрабатывать на месте за один раз (нет необходимости во вторичном зажиме), скорость загрузки и разгрузки быстро, скорость позиционирования высокая, а точность обработки высокая.Высокая, высокая эффективность обработки.
2.Структура машиныфункции:
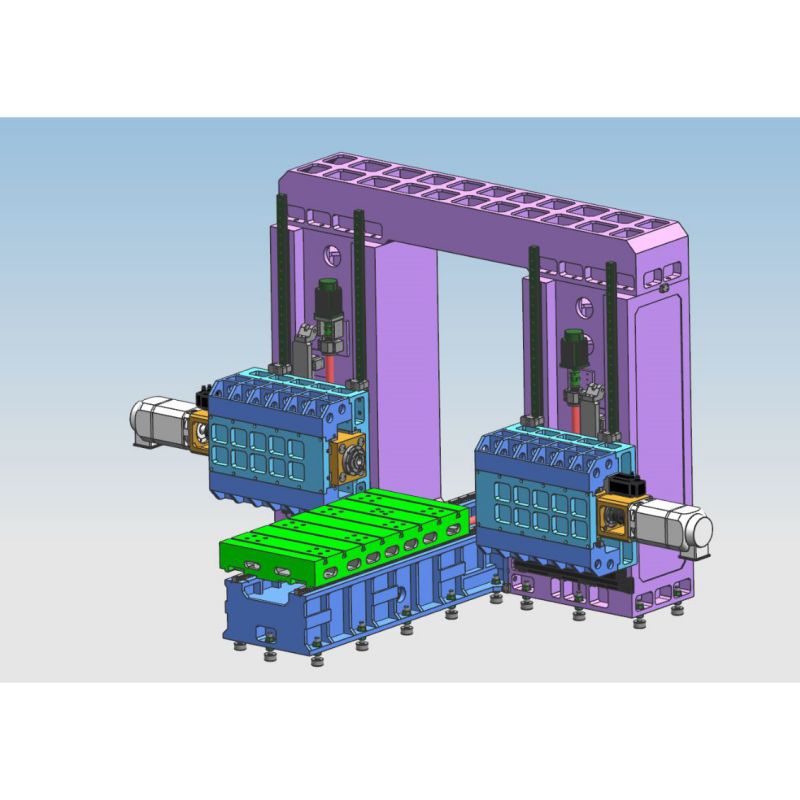
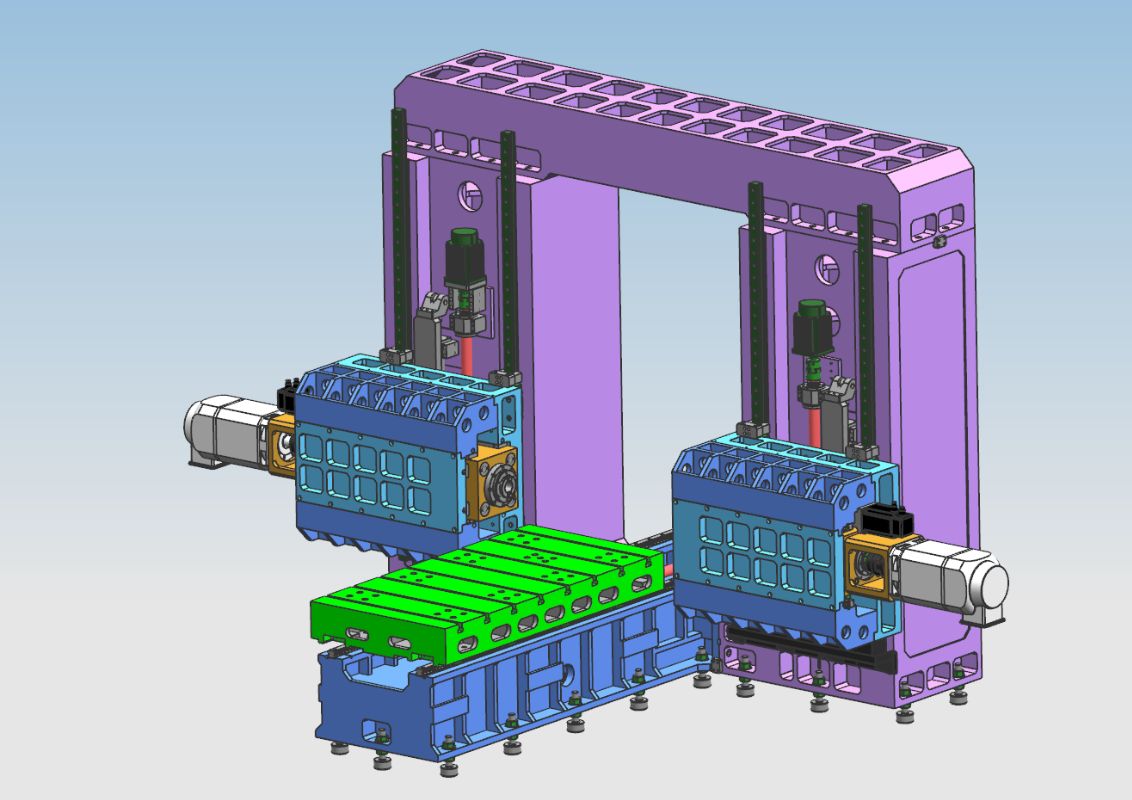
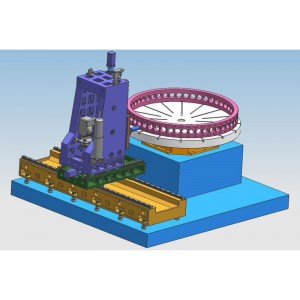
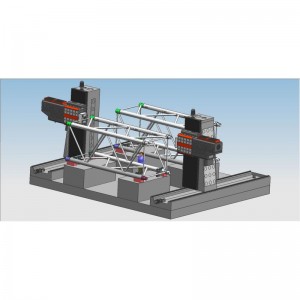
Основные компоненты станка: станина, верстак, левая и правая колонны, балки, портальные соединительные балки, седла, домкраты и т. д., крупные детали изготовлены из смоляного литья в песчаную форму, высококачественное литье из серого чугуна 250, отожженное в горячем песчаная яма → вибрационное старение → термическая обработка Отжиг в печи → вибрационное старение → грубая обработка → вибрационное старение → отжиг в горячей печи → вибрационное старение → отделка, полностью устранить отрицательное напряжение деталей и сохранить производительность деталей стабильной.Неподвижная станина, левая и правая колонны, портал и верстак перемещаются;Он имеет функции фрезерования, растачивания, сверления, зенкерования, нарезания резьбы и т. д. Способ охлаждения инструмента — внешнее охлаждение.Станок содержит 5 осей подачи, которые могут реализовать 4-осевое соединение и 5-осевое одинарное действие.Есть 2 силовые головки.Ось станка и силовая головка показаны на рисунке ниже.
2.1Основная конструкция кормовой части осевой передачи
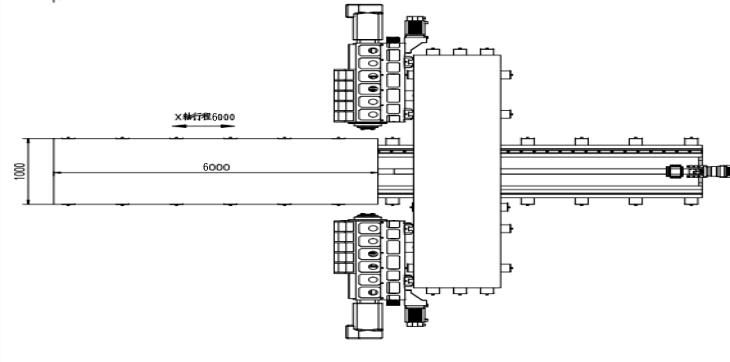
2.1.1. Ось X:Рабочий стол совершает возвратно-поступательные движения в поперечном направлении вдоль направляющей неподвижной станины.
X 1-осевой привод: серводвигатель переменного тока плюс высокоточный планетарный редуктор приводится в движение шарико-винтовой передачей для управления движением верстака для реализации линейного движения по оси X
Форма направляющей: уложите две высокопрочные прецизионные линейные направляющие.
2.1.2 Ось Z1:Силовая головка и седло установлены вертикально на передней стороне колонны и совершают возвратно-поступательные движения вверх и вниз по направляющей колонны.
Передача по оси Z1: серводвигатель переменного тока и синхронное колесо используются для привода шарико-винтовой передачи для привода седла для реализации линейного движения по оси Z.
2.1.3 Ось Z2:Силовая головка и седло установлены вертикально на передней стороне колонны и совершают возвратно-поступательные движения вверх и вниз по направляющей колонны.
Передача по оси Z2: серводвигатель переменного тока и синхронное колесо используются для привода шарико-винтовой передачи для привода седла для реализации линейного движения по оси Z.
2.1.4 Ось Y1:Седло силовой головки установлено вертикально на передней стороне правой стойки и совершает возвратно-поступательные движения влево и вправо вдоль направляющей стойки.
Передача по оси Y1: серводвигатель переменного тока плюс высокоточный планетарный редуктор используется для привода ползуна для перемещения через шарико-винтовую передачу для реализации линейного движения по оси Y1.
2.1.5 Ось Y2:Седло силовой головки установлено вертикально на передней стороне правой стойки и совершает возвратно-поступательные движения влево и вправо вдоль направляющей стойки.
Передача по оси Y2: серводвигатель переменного тока и высокоточный планетарный редуктор используются для привода ползуна для перемещения через шарико-винтовую передачу для реализации линейного движения по оси Y2.
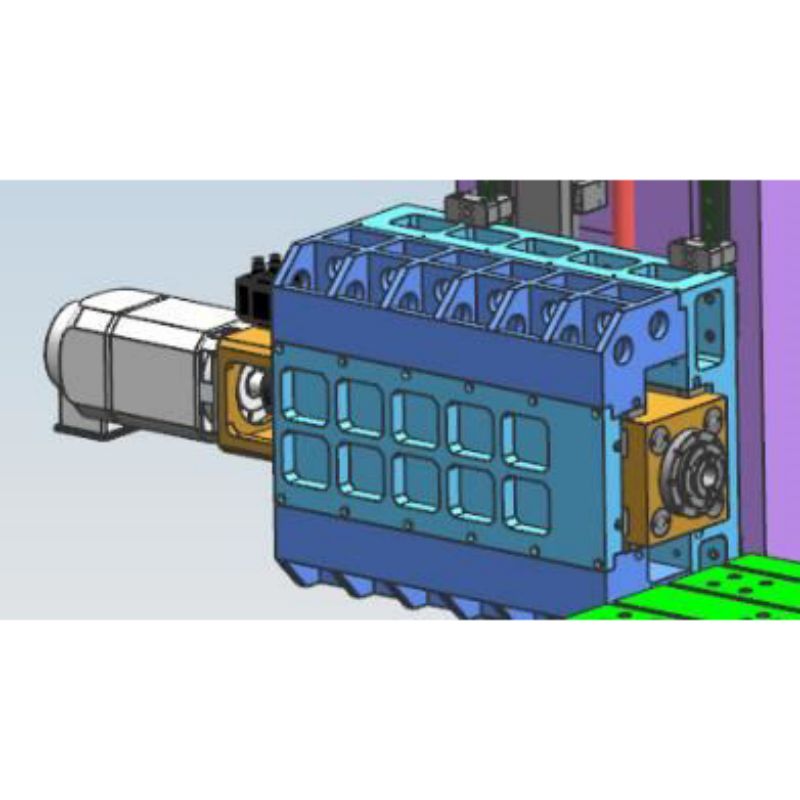
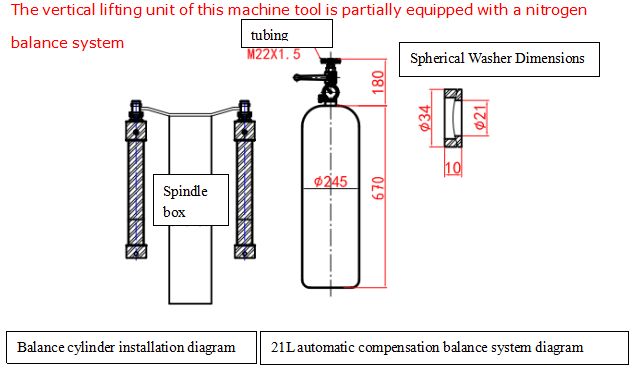
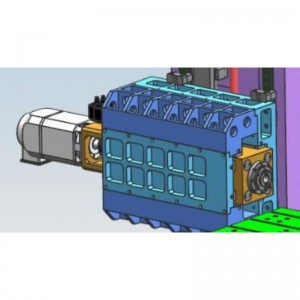
2.2 Направление движения сверлильно-фрезерной силовой головки (включая силовую головку 1 и 2) определяется 4 парами линейных направляющих роликов, а в приводе используется серводвигатель переменного тока для привода синхронного ремня (i = 2) и прецизионного шарика. винтовая парная передача.В силовой головке используется сервопривод. Двигатель замедляется синхронным ремнем и синхронным колесом, направляется парой сверхмощных прецизионных направляющих и приводит во вращение вертикальный шариковый винт для реализации вертикального движения силовой головки.Он также оснащен азотным балансиром для уменьшения расстояния между головкой и винтом и серводвигателем.Двигатель оси Z имеет функцию автоматического торможения.В случае сбоя питания автоматический тормоз крепко удерживает вал двигателя, чтобы он не мог вращаться.При работе, когда сверло не касается заготовки, оно будет быстро подаваться;когда сверло касается заготовки, оно автоматически переключается на рабочую подачу.Когда сверло проникнет в заготовку, оно автоматически переключится на быструю перемотку;когда конец сверла покидает заготовку и достигает заданного положения, рабочий стол переместится к следующему положению отверстия, чтобы реализовать автоматическую циркуляцию.Силовая головка использует комбинацию провода и жесткого рельса, что не только обеспечивает скорость работы оборудования, но и значительно повышает жесткость оборудования.И он может выполнять функции сверления глухих отверстий, фрезерования, снятия фаски, стружкодробления, автоматического удаления стружки и т. д., что повышает производительность труда.
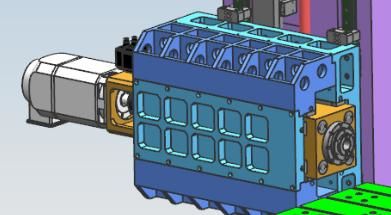
(левая силовая головка)
2.3. Удаление стружки и охлаждение
С обеих сторон под рабочим столом установлены спиральные и плоские цепные конвейеры для стружки, а стружка может автоматически выгружаться на конвейер для стружки в конце через две ступени спиральных и цепных пластин для реализации цивилизованного производства.В баке охлаждающей жидкости конвейера для стружки имеется охлаждающий насос, который можно использовать для внешнего охлаждения инструмента, чтобы обеспечить производительность сверления и срок службы сверла, а охлаждающую жидкость можно использовать повторно.
3. Полностью цифровая система числового управления:
3.1.С функцией ломки стружки время ломки стружки и цикл ломки стружки можно установить на человеко-машинном интерфейсе.
3.2.С помощью функции подъема инструмента высоту подъема инструмента можно установить в человеко-машинном интерфейсе.Когда сверление достигает этой высоты, сверло быстро поднимается к вершине заготовки, после чего стружка отбрасывается, а затем быстро направляется к поверхности сверления и автоматически преобразуется в работу.
3.3.Блок централизованного управления и портативный блок используют систему числового управления и оснащены интерфейсом USB и ЖК-дисплеем на жидких кристаллах.Для облегчения программирования, хранения, отображения и связи операционный интерфейс имеет такие функции, как диалог «человек-машина», компенсация ошибок и автоматическая сигнализация.
3.4.Оборудование имеет функцию предварительного просмотра и повторной проверки положения отверстия перед обработкой, и операция очень удобна.
3.5.Автоматическая смазка
Прецизионные пары линейных направляющих станков, прецизионные пары шарико-винтовых пар и другие высокоточные пары перемещения оснащены автоматическими системами смазки.Автоматический смазочный насос выдает масло под давлением, а масляная камера количественного лубрикатора поступает в масло.После того, как масляная камера заполнена маслом, когда давление в системе повышается до 1,4-1,75 МПа, реле давления в системе закрывается, насос останавливается, и одновременно разгружается разгрузочный клапан.Когда давление масла на дороге падает ниже 0,2 МПа, количественный лубрикатор начинает заполнять точку смазки и завершает одну заправку маслом.Благодаря точной подаче масла количественной масляной форсункой и обнаружению давления в системе подача масла надежна, обеспечивая наличие масляной пленки на поверхности каждой кинематической пары, уменьшая трение и износ, а также предотвращая повреждение внутренняя структура, вызванная перегревом., чтобы обеспечить точность и срок службы станка.По сравнению с парой скользящих направляющих, роликовые линейные направляющие, используемые в этом станке, имеют ряд преимуществ:
① Чувствительность к движению высока, коэффициент трения роликовой направляющей мал, всего 0,0025~0,01, а мощность привода значительно снижена, что эквивалентно лишь 1/10 обычного оборудования.
② Разница между динамическим и статическим трением очень мала, а отслеживание превосходно, то есть временной интервал между управляющим сигналом и механическим действием чрезвычайно короткий, что способствует повышению скорости отклика и чувствительности. система числового управления.
③Он подходит для высокоскоростного линейного движения, а его мгновенная скорость примерно в 10 раз выше, чем у скользящих направляющих.
④ Он может реализовать движение без зазоров и улучшить жесткость движения механической системы.
⑤Производится профессиональными производителями, отличается высокой точностью, универсальностью и простотой обслуживания.
4. Условия использования машины:
Электропитание: трехфазный переменный ток 380 В ± 10%, 50 Гц ± 1 Температура окружающей среды: 0° ~ 45°
5. ГлавнаяТехнические характеристики:
| Модель | БОСМ6010 | |
| Максимальный размер обрабатываемой детали | Длина × ширина × высота (мм) | 6000×1000×1500 |
| Максимальная подача портала | Ширина (мм) | 1300 |
| размер рабочего стола | Длина х ширина (мм) | 6000*1000 |
|
Горизонтальная буровая головка плунжерного типа сила головы один два
| Количество (2) | 2 |
| Конус шпинделя | BT50 | |
| Диаметр сверления (мм) | Φ2-Φ60 | |
| Диаметр резьбы (мм) | М3-М30 | |
| Скорость шпинделя (об/мин) | 30~6000 | |
| Мощность серводвигателя шпинделя (кВт) | 37 | |
| Расстояние до вершины одного шпинделя от центра стола (мм) | 150-650 | |
| Межосевое расстояние переднего конца двойного шпинделя (мм) | 300-1300 | |
| Левый и правый ход одного штока (мм) | 500 | |
| Расстояние между центром ползуна и плоскостью стола (мм) | 200-1700 | |
| Ход поршня вверх и вниз (мм) | 1500 | |
| Повторяемость | 300мм*300мм | ±0,02 |
| Размеры станка | Длина × ширина × высота (мм) | по чертежам |
| Полная масса (т) | (прибл.) 36 | |
Вышеуказанные параметры являются предварительными расчетными параметрами.В фактической конструкции могут быть изменения в соответствии с требованиями к обработке заготовки и требованиями к конструкции станка, чтобы соответствовать требованиям обработки деталей вашей компании.

Отправьте нам свое сообщение:
Категории товаров
-
BOSM -4Z2000 Высокоскоростное сверление и фрезерование с ЧПУ...
-

Станок для сверления фланцев вала с четырьмя станциями
-

Сверлильно-фрезерный станок с ЧПУ для тяжелых условий эксплуатации
-

Трубосверлильный станок с ЧПУ
-
BOSM-6025 Расточно-фрезерный станок с оппозитной головкой
-
БОСМ-12010 Расточно-фрезерный станок с оппозитной головкой





